Project Description
Area Description
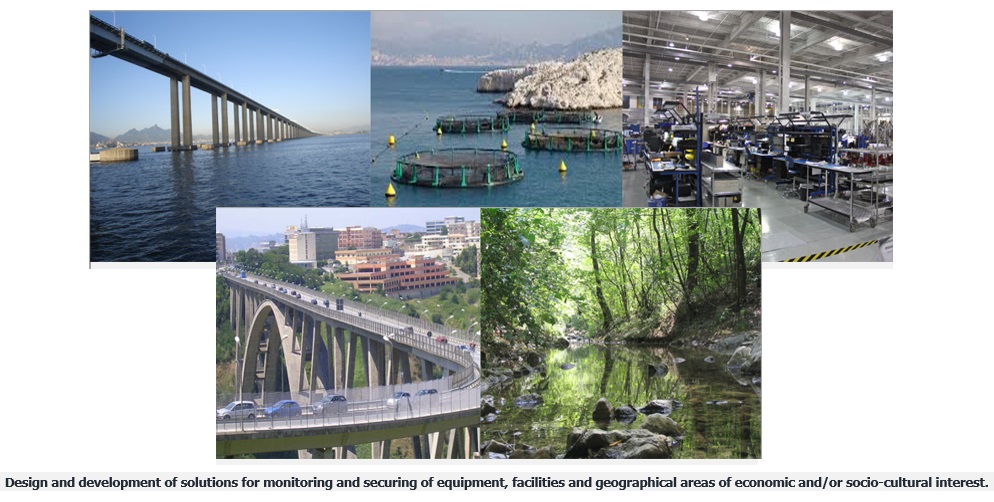
The team is involved in research and development of innovative solutions which meet the different needs of security, monitoring and control and applicable to Aerospace, Naval, Automotive and Defense sectors. The systems are designed to provide, through a monitoring and remote control of all security subsystems, support operators predisposed to the management of operational situations and/or emergency that may endanger the safety of property and/or people in various fields. Some application examples: systems for checking the damage on board ship, management of complex public or private buildings, safety and supervision of production facilities , aquaculture facilities , bridges , viaducts , geographical protected areas…. Such knowledge-intensive systems for decision support provide guidance on best practices for the resolution of problems of various kinds or running reconfiguration control.
The work is done in close collaboration with the spinoff Apphia s.r.l..
- Monitoring and automation systems for naval and building;
- Decision Support System for security and safety.
- Design and development of SCADA/HMI solutions for remote control and supervision;
- Design and development of decision support systems;
- Design and development of onboard stability system;
- Design and development of virtual trainers and simulation environments;
- Definition and implementation of algorithms and techniques for system identification and robust control;
- Design and development of innovative solutions and devices for building and production installations safety.
- Linguaggi di Programmazione: C#, C/C++, Java, JSP, XML;
- (X)HTML, Javascript, Jquery, Ajax, Visual Basic;
- Programmazione in ambienti: Matlab/Simulink, Visual Studio.NET, LabView;
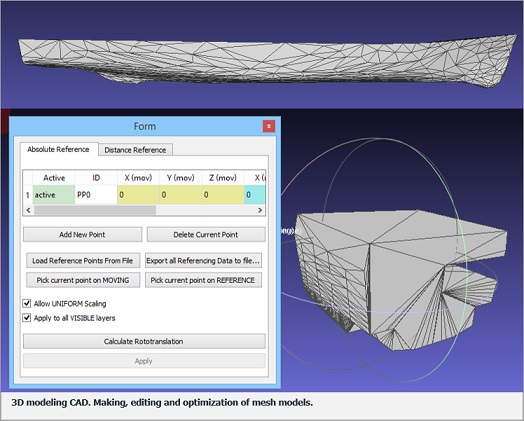
- CAD, CAM: AutoCAD, NX 4, Catia v5, SolidWorks, VisualNastran Desktop, Rhinoceros;
- Database: SQL Server, Oracle, PostgreSQL, MySQL, Microsoft Access;
- UML e modellazione basi di dati relazionali.
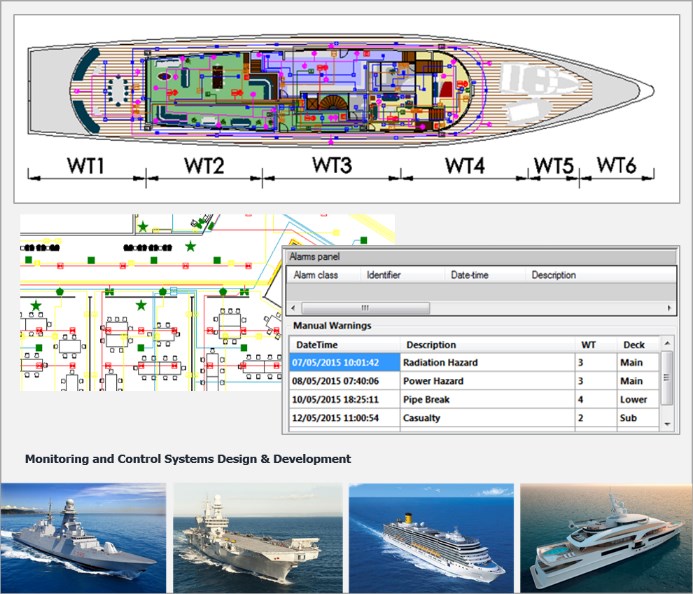
- an onboard ship system for monitoring and control the damages and for decision support act to the collection, processing and representation of data coming from over 4000 sensors;
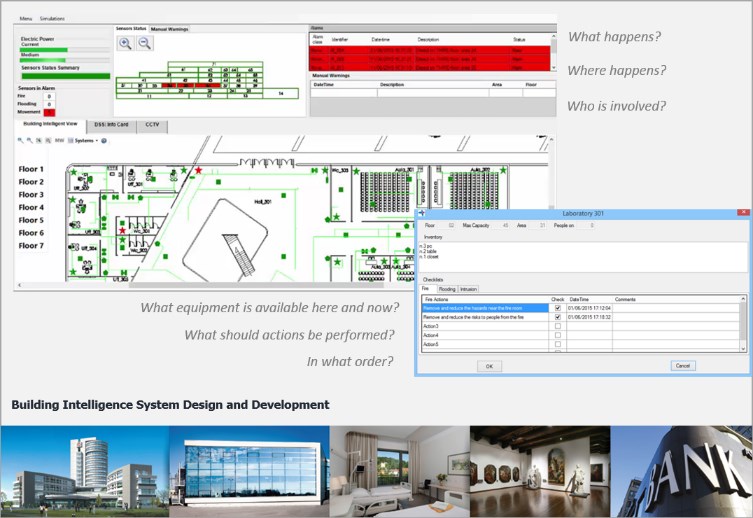
- an onboard ship system for decision support act to the management of different operational situations. The system integrates information about the compartments and their contents, the state of the sensors and the control on actuators, the management and implementation of operational procedures by the crew;
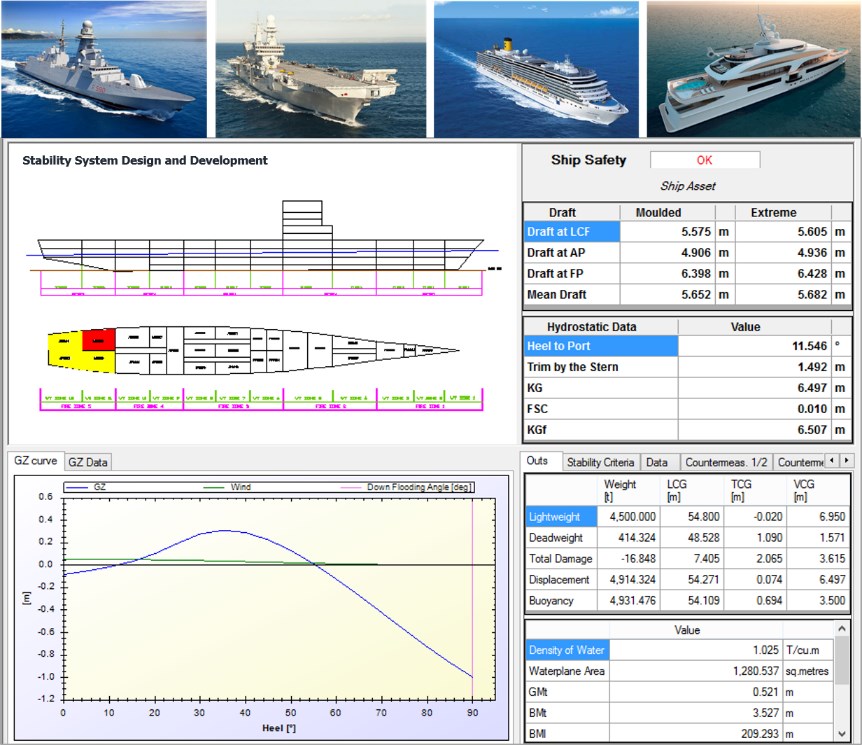
- an onboard ship system for the calculation of the stability, on the basis of the loads, of the data coming from the tank level sensors and of possible damages, both real-time and simulation;
- a prototype device, to be installed on board vessels, discharge to collecting data from available equipment and their distribution via Wi-Fi jointly with the marine forecast from providers remote. This information is conveyed to Android devices and to a generic tablet customized for the marine environment.
For more information please contact: Francesca Calabrese (francesca.calabrese@apphia.it)
Progetti collegati



Initiatives and projects with
- ANAS S.p.A.,
- Centro Euro-Mediterraneo sui Cambiamenti Climatici (CMCC) S.c.ar.l.,
- Consorzio Interuniversitario Regionale Pugliese (CIRP),
- Consorzio Interuniversitario Regionale Pugliese (CIRP)
- Demetrio s.r.l,
- Domoconfort s.r.l,
- Iniziative s.r.l.,
- TrafilCoop Soc. Coop.,
- Avio S.p.A.
Scientific Publications
- Calabrese, A. Corallo, A. Margherita, A.A. Zizzari., A knowledge-based decision support system for shipboard damage control, Expert Systems with Applications 39 (2012) 8204–8211
- Calabrese, L. Mancarella, A.A. Zizzari, A. Corallo, A multidisciplinary method for evaluating ship stability, Journal of Shipping and Ocean Engineering, (2012), JSOE-E 20120711-1, pag. 321-326, David Publishing Company, Chicago, IL, USA.
- Bonarelli, G.Bressani, M. Cataldo, G. Coppini, A. Corallo, F. Laterza, M.E. Latino, A. Marguglio, V. Morreale, M. Notarangelo, A. A. Zizzari and V. Zonno, The SEA (Security for marine Environment and Aquaculture) project: Advanced production and processing, food security and sustainable aquaculture, Offshore Mariculture Barcelona 6th – 8th April 2016, Barcelona, Spain.
- Calabrese, M. Cataldo, A. De Pascalis, L. Mancarella, L. Ostuni, A.A. Zizzari, A method for evaluating the ship equilibrium point using 3D meshes developed for embedded device, OCEANS’15 MTS/IEEE Genova, May 18-21, 2015, Genova (Italy).
- Calabrese, M. Cataldo, A. De Pascalis, L. Mancarella, L. Ostuni, A.A. Zizzari, Calculation of the Ship Equilibrium Point using 3D Mesh Models on Low Cost Embedded Boards,14th International Conference on Computer Applications and Information Technology in the Maritime Industries (COMPIT 2015), May 11-13, 2015, Ulrichshusen/Germany.
- Ciminelli C., Armenise M.N., Bevilacqua V., Bozzetti M., Carnimeo L., Di Marzo M., Dotoli M.G., Fanti, M.P., Giannoccaro I., Mastronardi G., Messina A., Ottomanelli M., Sasanelli N., Reina G., Abbatecola L., Carlone G., Dellisanto M., De Palo M., Innone F., Salatino A., Stipo S., Tatoli T., Alessandris M., Mottica M., Zizzari A. A. Lore’ A., Malerba S., “Advanced Logistics for people and goods mobility: mathematical models and trials related to new protocols for mail delivery (LAMRECOR project)”, In proceeding of 1st Workshop on the State of the art and Challenges Of Research Efforts @POLIBA (SCORE@POLIBA) December 3 – 5, 2014 – Politecnico di Bari, Italy. Pag. 397
- Ostuni, A. De Pascalis, F. Calabrese, M. Cataldo, L. Mancarella, A.A. Zizzari, An On-board Expert System for Damage Control Decision Support, In Proceedings of the 12th International Conference on Computer Applications and Information Technology in the Maritime Industries (COMPIT 2013), 15-17 April 2013, Cortona, Italy, pagg. 238-247.
- A. Zizzari, F. Calabrese, G. Indiveri, A. Coraddu, D. Villa, A Comparative Study on Different Approaches to evaluate Ship Equilibrium Point, In Proceedings of the XXXIV International Conference on Marine and Naval Engineering (ICMNE2013), Zurich, Switzerland, January 14-15, 2013, edited by World Academy of Science, Engineering and Technology, Issue 0073, January 2013 pagg 625-629.
- Calabrese, M. Cataldo, A. De Pascalis, L. Mancarella, L. Ostuni, A.A. Zizzari, A. Corallo, Un metodo FEA-like per la valutazione del punto di equilibrio di una nave, In Proceedings of Decennale MIMOS – Movimento Italiano Modellazione e Simulazione, 9-11 Ottobre 2012 – Roma, Campus Universitario Tor Vergata
- Calabrese, M. Cataldo, A. Corallo, A. De Pascalis, L. Mancarella, L. Ostuni, A.A. Zizzari, Damage Control System: an Application for Ship Safety and Security, In Proceedings of the 9th IFAC Conference on Manoeuvring and Control of Marine Craft (MCMC2012), Arenzano (GE), September 19-21, 2012
- Mancarella, F. Calabrese, A.A. Zizzari., A. Corallo, Integration of CAD Tools in Damage Management System, In Proceedings of the 9th IFAC Conference on Manoeuvring and Control of Marine Craft (MCMC2012), Arenzano (GE), September 19-21, 2012
- Calabrese, A. Corallo, L. Mancarella, A.A. Zizzari, A FEA-like method for evaluating the ship equilibrium point, In Proceedings of the 9th IFAC Conference on Manoeuvring and Control of Marine Craft (MCMC2012), Arenzano (GE), September 19-21, 2012
- Indiveri, S.Creti, A.A.Zizzari, A Proof of Concept for the Guidance of 3D Underactuated Vehicles Subject to Constant Unknown Disturbances, In Proceeding of the 9th IFAC Conference on Manoeuvring and Control of Marine Craft (MCMC2012), Arenzano (GE), September 19-21, 2012
- Calabrese, M. Cataldo, A. De Pascalis, L. Mancarella, L. Ostuni, A.A. Zizzari, A. Corallo, A novel approach for safety and security ship management, In Proceeding of World Maritime Technology Conference, 29 May – 1 June 2012, Lenexpo, Saint Petersburg, Russia, ISBN 978-5-88303-503-5
- Mancarella, F. Calabrese, A.A. Zizzari., A. Corallo, Advanced CAD tools for naval applications, In Proceeding of World Maritime Technology Conference, 29 May – 1 June 2012, Lenexpo, Saint Petersburg, Russia, ISBN 978-5-88303-503-5
- Ostuni, F. Calabrese, A.A. Zizzari, A. Corallo, Decision support system as informatics support in naval environment, In Proceeding of World Maritime Technology Conference, 29 May – 1 June 2012, Lenexpo, Saint Petersburg, Russia, ISBN 978-5-88303-503-5
- Calabrese, L. Mancarella, A.A. Zizzari, A. Corallo, A multidisciplinary method for evaluating ship stability, In Proceeding of World Maritime Technology Conference, 29 May – 1 June 2012, Lenexpo, Saint Petersburg, Russia, ISBN 978-5-88303-503-5
- Calabrese, L. Coluccio, A. Corallo, L. Mancarella, L. Ostuni and A.A. Zizzari, High Informative Content Management in Shipboard Applications, in Proceedings of IV International Conference on Computational Methods in Marine Engineering, held in Lisbon, Portugal 28-30 September 2011, ISBN: 978-84-89925-79-3
- Ostuni, F. Calabrese, A.A. Zizzari and A. Corallo, A Novel Approach for Decision Support System in Marine Applications, in Proceedings of IV International Conference on Computational Methods in Marine Engineering, held in Lisbon, Portugal 28-30 September 2011, ISBN: 978-84-89925-79-3
- Coluccio, A.A. Zizzari, M.M. Manzo, F. Calabrese and A. Corallo, A Multidisciplinary Approach for On Board Stability System, in Proceedings of IV International Conference on Computational Methods in Marine Engineering, held in Lisbon, Portugal 28-30 September 2011, ISBN: 978-84-89925-79-3
- Mancarella, F. Calabrese, A.A. Zizzari and A. Corallo, Advanced CAD Integrated Approach for Naval Applications, in Proceedings of IV International Conference on Computational Methods in Marine Engineering, held in Lisbon, Portugal 28-30 September 2011, ISBN: 978-84-89925-79-3
- Indiveri, G. Parlangeli, P. Pedone and A.A. Zizzari, Path Planning and Following for Underactuated Marine Vehicles: a Summary of Some Recent Results. Convegno Annuale dei Docenti e Ricercatori Italiani in Automatica, Automatica.it, Pisa, Italy, 7-9 settembre 2011
- N. Peraudo, A. Corallo, P. Bosco, A.A. Zizzari, G.P. DePoli, A Collaborative Engineering Platform for Supporting Design Optimisation of Advanced Aero Engine Sub-Systems, In Proceedings of the 2011 SIMULIA Customer Conference, SCC2011, Barcelona, Spain, May 2011
- Pedone, A.A. Zizzari and G. Indiveri, Path Following for the Dynamic Model of a Marine Surface Vessel without Closed-Loop Control of the Surge Speed. In Proceedings of the 8th IFAC Conference on Control Applications in Marine Systems, CAMS 2010, Rostock-Warnemünde, Germany, September 15-17, 2010. (10.3182/20100915-3-DE-3008.00019)
- A. Zizzari, P. Pedone and G. Indiveri, A Path Following Controller for the Dynamic Model of a Marine Surface Vessel. In proceedings of to the 7th IFAC Symposium on Intelligent Autonomous Vehicles 2010, IAV 2010, Lecce, Italy, September 6-8, 2010. (10.3182/20100906-3-IT-2019.00029)
- Parlangeli, L. Ostuni, L. Mancarella, G. Indiveri, A Motion Planning Algorithm for Smooth Paths of Bounded Curvature and Curvature Derivative. In proceedings of the 17th Mediterranean Conference on Control and Automation (MED 2009). Thessaloniki, Greece [10.1109/MED.2009.5164517]
- A. Zizzari, G. Indiveri, M. Bibuli, G. Bruzzone, M. Caccia, Path Following Guidance Control with Bounded Control Effort: Application to the Charlie Unmanned Surface Vehicle, In Proceedings ot the 8th IFAC International Conference on Manoeuvring and Control of Marine Craft, September 16-18, 2009, Casa Grande Hotel, Guarujá (SP), Brazil (10.3182/20090916-3-BR-3001.00016)
- Arrichiello, S. Chiaverini, P. Pedone, A. A. Zizzari, and G. Indiveri. The Null-Space based Behavioral control for non-holonomic mobile robots with actuators velocity saturation. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, May 12-17, 2009, May 12-17 2009. [10.1109/ROBOT.2009.5152271]
- Bibuli, G. Bruzzone, M. Caccia, G. Indiveri, and A.A. Zizzari. Line Following Guidance Control: Application to the Charlie Autonomous Surface Vehicle. In Proceedings of the 2008 IEEE/RSJ International Conference On Intelligent Robots And Systems (2008 IROS), Acropolis Convention Center, Nice, France, Pages 3641-3646, September 22-26 2008. [10.1109/IROS.2008.4650890]
- Indiveri and A.A. Zizzari. Kinematics Motion Control of an Underactuated Vehicle: a 3D Solution with Bounded Control Effort. In Proceedings of the Ifac Workshop On Navigation, Guidance And Control Of Underwater Vehicles, IFAC NGCUV 2008, Killaloe, Irelnd, April 8-10 2008. (10.3182/20080408-3-IE-4914.00014)
- Indiveri, A. A. Zizzari, and V. G. Mazzotta. Linear Path Following Guidance Control for Underactuated Ocean Vehicles. In Proceedings Of The 2007 IFAC Conference On Control Applications In Marine Systems, CAMS 2007, Bol, Croatia, September 19-21 2007. (10.3182/20070919-3-HR-3904.00016)
- A. Zizzari, Technical Report on Linear path following guidance control for underactuated ocean vehicles, August 28, 2007, Fraunhofer – Institut Intelligente Analyse- und Informationssysteme Schloß Birlinghoven, D-53754 Sankt Augustin, Germany
- Casciaro, R. Palmizio Errico, F. Conversano, E. Casciaro, L. Ostuni, A. Distante, Characterization methodology for sound absorption of synthetic materials in ultrasound in vitro studies. In proceedings of 13th Nordic Baltic Conference, Umea, Sweden, 2005.
- Calabrese, G. Indiveri, An Omni-vision Triangulation-like Approach to Mobile Robot Localization, Joint 13th Mediterranean Conference on Control and Automation (MED’05) and 20th IEEE International Symposium on Intelligent Control (ISIC’05), 27-29 June 2005, Limassol, Cyprus.
- S. Casciaro, R. Palmizio Errico, F. Conversano, E. Casciaro, L. Ostuni, A. Distante, Phonoabsorption modelization techniques for new targeted phantom materials. 20th Annual Advances in Contrast Ultrasound, 2005 Chicago, IL (USA). [Winner of 1st Prize Poster Context]